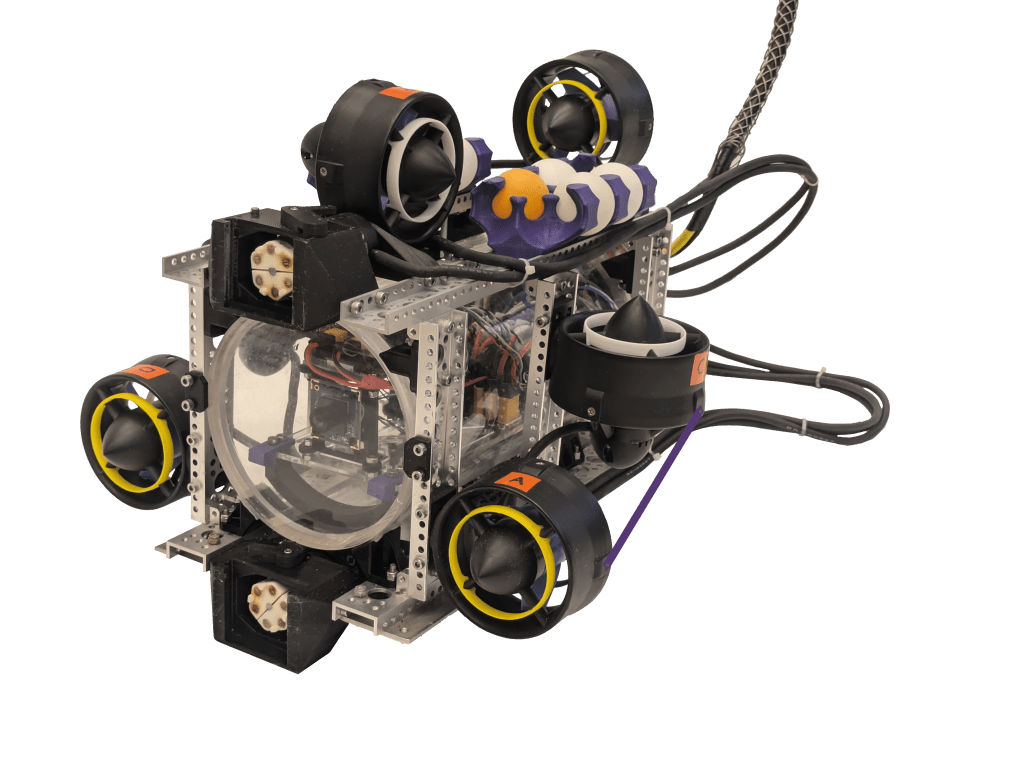
Boxfish 2.0 (2024-2025)
Building upon the foundation of last year’s Boxfish ROV, Boxfish 2.0 introduces a suite of innovations in both hardware and software. The vehicle features a redesigned manipulator system for greater dexterity, upgraded control software for smoother operation, and enhanced reliability across missions. These advancements earned the team the Innovation Award and secured a Top 10 overall placement at the 2025 MATE ROV World Championships.


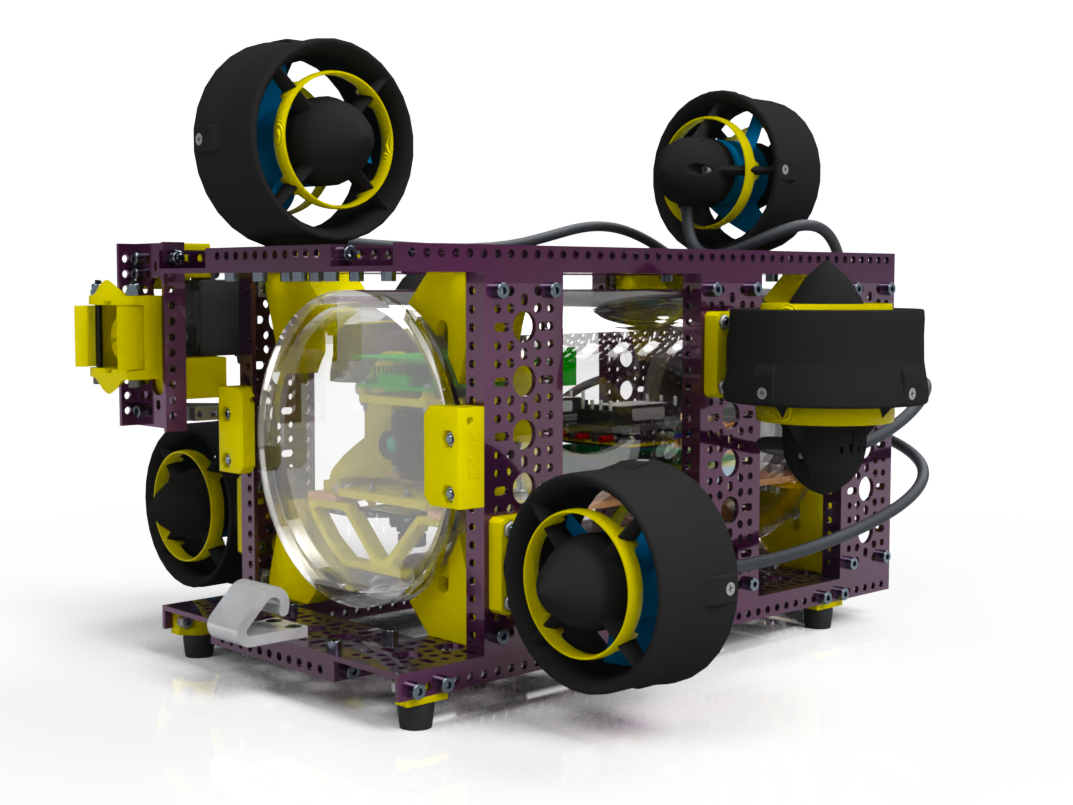
Boxfish (2023-2024)
Boxfish reiterates on the design of Barreleye, featuring a more robust modular manipulator system, easily adjustable ballasting, updated software, and more. Boxfish is named after the tropical boxfish (Ostracion cubicus) because of its resemblance to our ROV in shape and coloration.
Using Boxfish, UWROV placed 8th in the 2024 MATE ROV World Championships (Kingsport, Tennessee) and broke company records for in-pool performance.
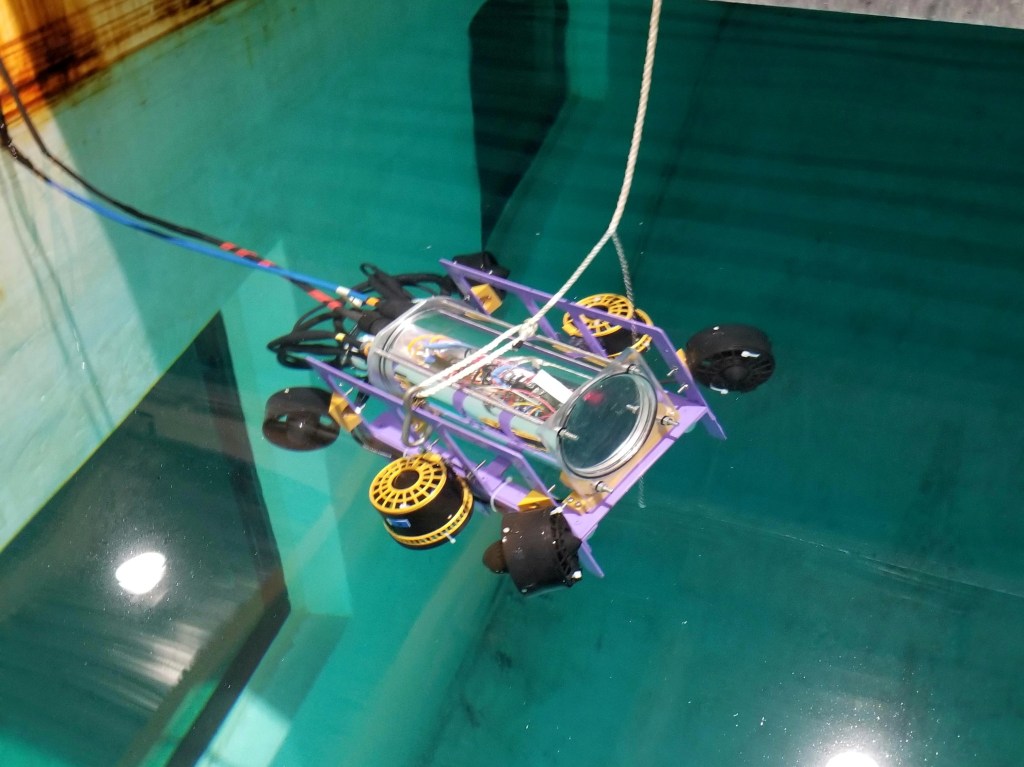
Barreleye (2021-2023)
Barreleye is named after the real-life barreleye fish due to the ROV’s iconic clear pressure hold that mimics the clear forehead of the real-life barreleye fish. Barreleye features custom made components, the first edition of the modular manipulator system, and a fully overhauled electrical system.
Using Barreleye, UWROV placed 2nd in the 2022 MATE ROV World Championships (Long Beach, California) and 9th in the 2023 MATE ROV World Championships (Longmont, Colorado) respectively. In 2023, the technical documentation for Barreleye was also published in the Journal of Ocean Technology.
Nautilus (2020-2021)
Nautilus is the product of major overhauls of control and surface systems, a redesigned GUI, and an aggressively cut down frame. Built mainly via online operations during the 2020-2021 season, Nautilus is the result of tireless work by UWROV members.
With Nautilus, UWROV placed 6th in the 2021 MATE World Championships in Johnson City, Tenessee.
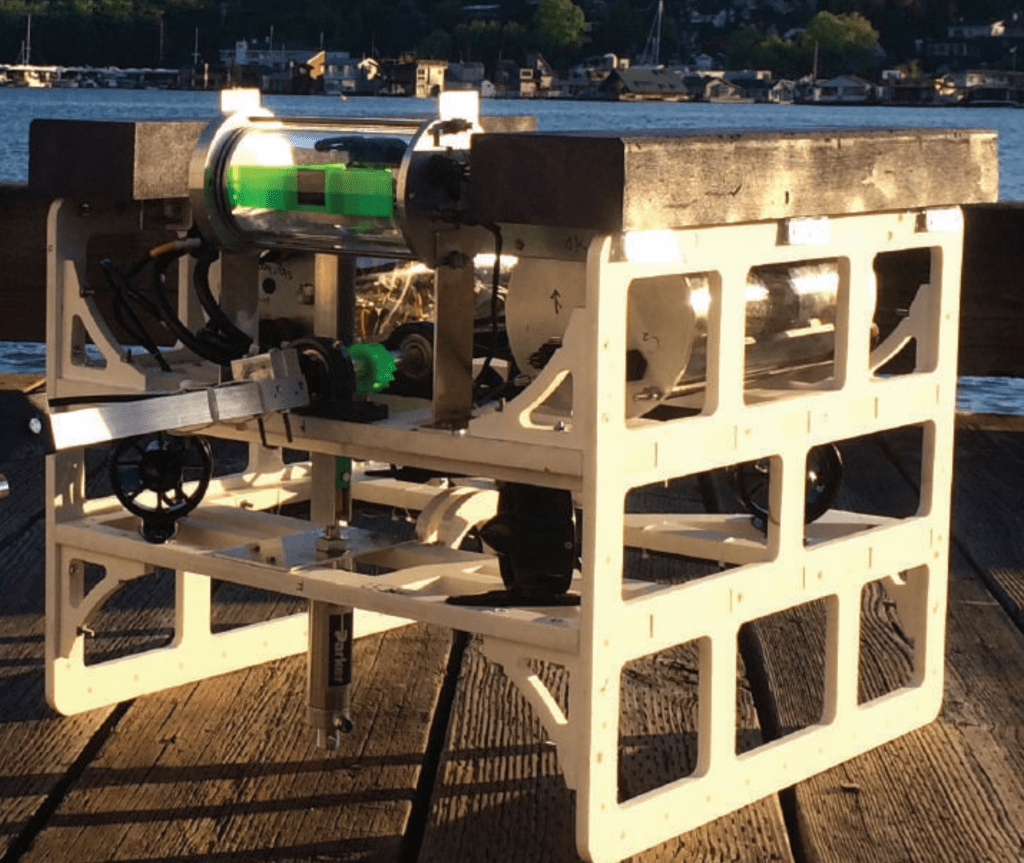
Admare (2014-2015)
Admare was designed for the 2015 MATE International ROV Competition in St. John’s, Newfoundland, with a focus on Arctic operations like under ice exploration, pipeline inspection, and subsea maintenance. The vehicle builds on the Orcus ROV with a reinforced HDPE frame, modular pressure housings, and a pneumatic manipulator capable of precise underwater movements.
Featuring six Blue Robotics T100 thrusters and a digital Ethernet based control system, Admare offered improved efficiency and maneuverability at greater depths. Using Admare, the UWROV team competed at the 2015 World Championships, where the vehicle’s innovative pneumatic systems and design received recognition for technical excellence.
Orcus (2013-2014)
Orcus was built as a durable and adaptable ROV platform designed for both competition and research. Its design features include dual acrylic pressure housings, a holonomic propulsion system with six Seabotix thrusters, and a marine grade polycarbonate frame machined at the UW Composites Lab. The ROV integrates modular electronics, dual cameras, and an intuitive Python based GUI for precise control and feedback.
Using Orcus, the UWROV team competed in the 2014 MATE International ROV Competition, where the vehicle’s performance and engineering documentation earned recognition for innovation and reliability. Orcus later acted as a foundation for future ROV designs and student research in subsea sensing and technology development.
Casus (2011-2012)
Casus was the University of Washington’s first ROV to compete internationally at the 2012 MATE ROV World Championships in Orlando, Florida. Built in just five months, Casus featured a modular aluminum frame, an Arduino based control system, and a pneumatic manipulator designed for precision underwater tasks.
The vehicle was equipped with three cameras, a custom oil extraction system, and a lift bag tool for mission specific operations. Casus laid the foundation for future UWROV designs, emphasizing adaptability, teamwork, and the pursuit of innovative marine technology solutions.

